400-700-9998
产品资讯2021-06-08
详解一下技术水平先进性的重要标志IMU-惯性姿态传感器
 IMU
IMU
惯性测量单元
惯性测量单元Inertial measurement unit,简称 IMU,是测量物体三轴姿态角(或角速率)以及加速度的装置。
目前来说,市面上存在的IMU以6轴与9轴为主。6轴IMU包含一个三轴加速度计,一个三轴陀螺仪;9轴IMU则多了一个三轴的磁力计。另外,对于MEMS(Micro-Electro-Mechanical System,中文称微机电系统)技术的IMU,一般还内置有温度计进行实时的温度校准。无论是6轴或9轴IMU,都可以实时的输出三维的加速度信号与加速度信号,以此解算出物体的当前姿态。这在在平台稳定与导航中有着重要的应用价值。

IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。
IMU的原理
当我们晚上回到家,发现家里停电时,眼睛在黑暗中什么都看不见的情况下,只能根据自己的经验,极为谨慎地走小碎步,并不断用手摸周围的东西(比如冰箱),用以确定自己所在的位置。
IMU的原理和黑暗中走小碎步很相似。
在黑暗中,由于自己对步长的估计和实际走的距离存在误差,走的步数越来越多时,自己估计的位置与实际的位置相差会越来越远。就像下图所示。

走第一步时,估计位置(黑人所在位置)与实际位置(白人所在位置)还比较接近;但随着步数增多,估计位置与实际位置的差别越来越大。
图中的小人只朝一个方向移动,是一维的。根据此方法推广到三维,就是惯性测量单元的原理。
学术上的语言是:以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。
惯性导航技术
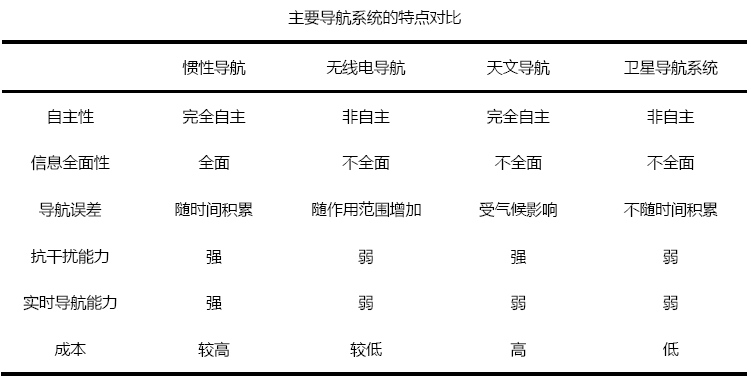
与其他导航系统相比, 惯导系统同时具有信息全面、 完全自主、 高度隐蔽、 信息实时与连续, 且不受时间、 地域的限制和人为因素干扰等重要特性 (见表 ), 可在空中、 水中、 地下等各种环境中正常工作。
惯性传感器
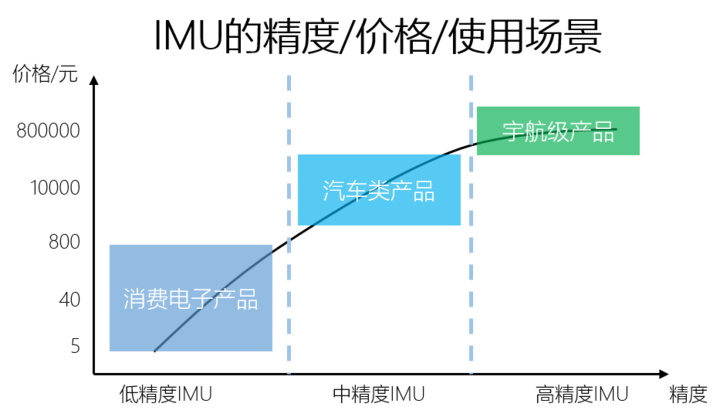
惯性传感器的发展情况直接决定了惯性导航系统的开发和应用,惯性传感器自身的成本、体积和功耗影响了惯性导航系统的相应参数指标。
惯性测量传感器的发展需要权衡以下几个因素:
精确性、连续性、可靠性、成本、体积/重量、功耗。
因此,在惯性器件研究方面,体积小、价格低廉的MEMS惯性传感器和高精度、高性能传感器将会是未来发展的重点。
MicroStrain惯性传感器产品包括有战术级、工业级和准工业级三个模块。各个模块的产品又分为辅助惯导系统、AHRS航姿参考系统、IMU惯性测量三个类型。MicroStrain的产品具有重量轻(最小仅8g),体积小,功耗低的特点。目前被广泛应用于航天航空、无人机飞行可控制、动中通等领域。
战术级辅助惯导
由GNSS模块、陀螺仪、加速度计、磁力计及卡尔曼滤波器等组成,能够接收多种卫星信号,并输出四元素、欧拉角等惯性参数。
3DM-RQ1-45
GNSS战术级辅助惯导
GNSS航向精度0.5°
陀螺仪零偏稳定性5°/hr
应对极低温度环境(-55℃~+80℃)

3DM-GQ4-45
GNSS战术级辅助惯导
GNSS航向精度0.5°
最多同时跟踪两种GNSS天线
陀螺仪零偏稳定性 5°/hr
双处理器运行卡尔曼滤波
工业级惯导系统
由MEMS陀螺仪、加速度计、磁力计及卡尔曼滤波器等组成。体积小,重量轻,功耗低。

3DM-GX5-45
轻小型组合导航系统
GNSS航向精度0.5°
位置精度2.5mRMS
小尺寸:44.2×36.6×11mm
重量轻:20g

3DM-GX5-25
航姿参考系统
小尺寸,重量轻
航向精度±0.8°,姿态精度±0.25°
陀螺仪零偏稳定性8°/hr
轻小型带自适应卡尔曼滤波器的工业级AHRS

3DM-GX5-15
陀螺仪零偏稳定性8°/hr
加速度计零偏稳定性0.04mg
垂直陀螺仪算法,姿态精度±0.25°
集成高精度压力计
准工业级惯导系统
OEM板PCB安装模式,体积小、重量轻(8g),功耗低(最低100mW)

3DM-CV5-25
航姿参考系统
小尺寸(38×24×9.7mm),重量轻(8g)
航向精度±0.8°,姿态精度±0.5°
陀螺仪零偏稳定性 8°/hr
双处理器运行卡尔曼滤波,提供高精度姿数据

3DM-CV5-15
垂直参考单元
陀螺仪零偏稳定性8°/hr
加速度计零偏稳定性0.04mg
双处理器卡尔曼滤波,姿态精度±0.5°
集成高精度压力计

3DM-CV5-10
惯性测量单元
陀螺仪零偏稳定性8°/hr
加速度计零偏稳定性0.04mg
支持PCB安装与传统安装
集成高精度压力计
惯性技术已经成为一国技术水平先进性的重要标志之一,其先进程度和应用水平关系到国家多个行业的信息化水平和自动化控制水平。引进高水平惯导产品迫在眉睫。
更多惯性传感器产品信息,请联系欧美大地。
服务热线:400-700-9998